...
Необходимо отметить, что для узлов оборудования, в скриптах отображающих поведение коммутационного аппарата на ИЧМ используются только двухпозиционные сигналы (по стандарту МЭК 61850-7-4-2011). Способы их реализации - конфигурация непосредственно на модуля дискретного ввода или посредством дорасчёта (пример с дорасчётом для РЗА будет приведен далее). В текущей инструкции для примера каналов состояния (двухпозиционные сигналы) были использованы виртуальные сигналы контроллера, для примера команды управления (будет рассмотрена только для Выключателя) - ТУ клиента AutoTS на контроллере. Для конфигурации на реальном оборудовании необходимо иметь каналы отражающие нужные сигналы/команды.
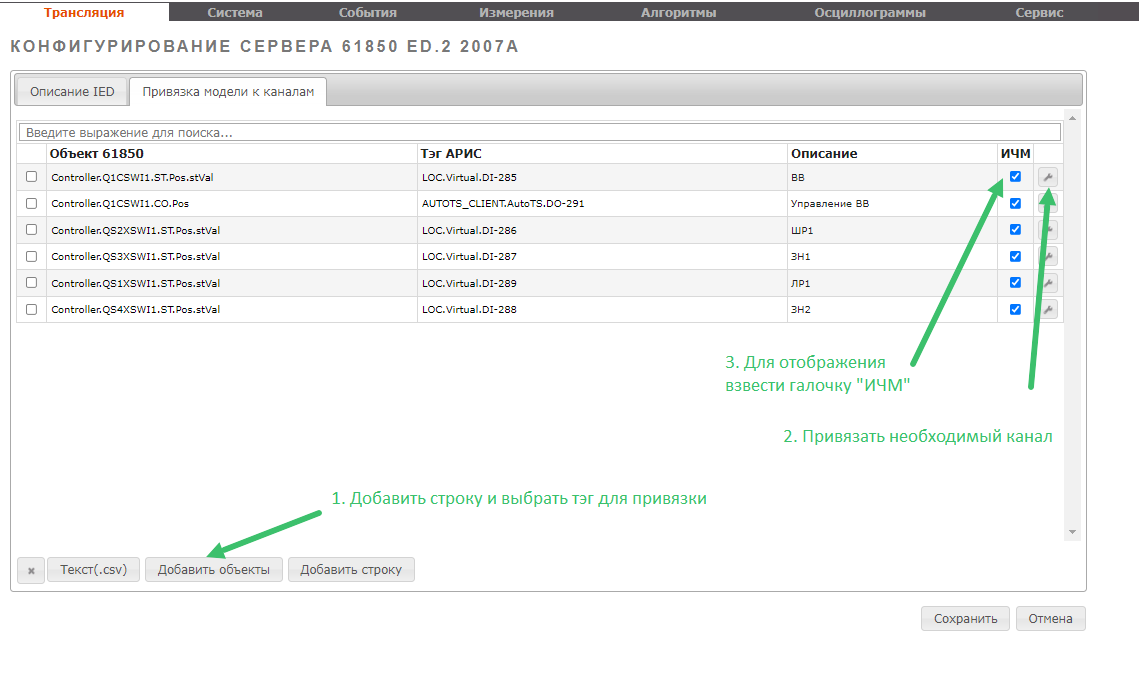
В модели 61850 для оборудования разных типов заданы свои логические узлы. В примере значимые логические узлы есть только у Выключателя, Разъединителей и Заземляющих ножей. Ниже приведена расшифровка некоторых тэгов и пример привязки каналов состояния/управления с пояснением в поле «Описание» на нем будет указано название тэга и за что он отвечает.
Пример тэга: QS2XSWI1.ST.Pos.stVal, где
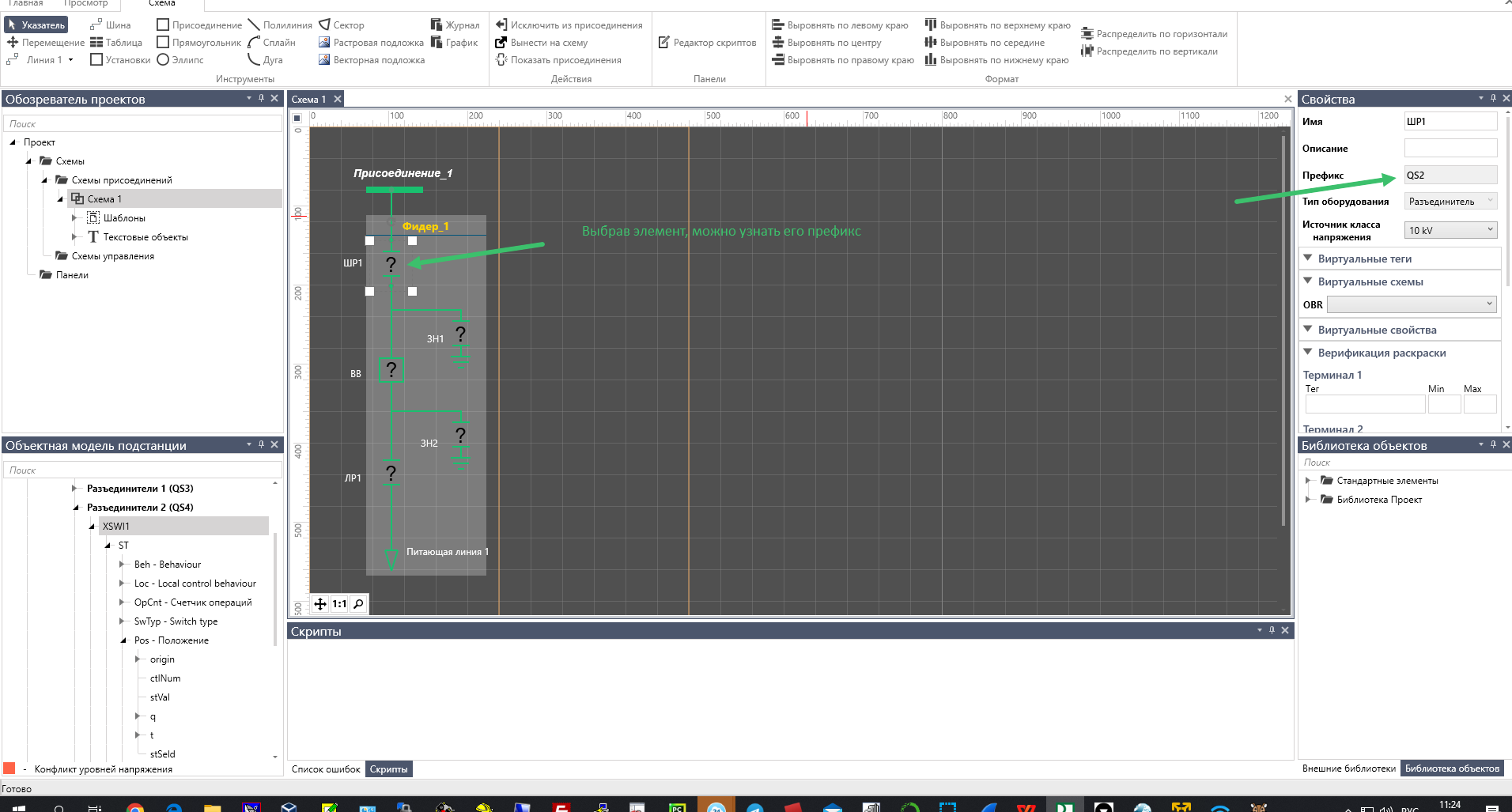
QS2 - префикс с нумерацией для разъединителя (посмотреть можно в проекте посредством RedkitBuilder)
XSWI1 - логический узел для состояния и управления разъединителем (зазем.ножом), также имеет нумерацию
ST.Pos.stVal - отображение состояния объекта
Привязка будет выглядеть следующим образом:
* Краткое отступление
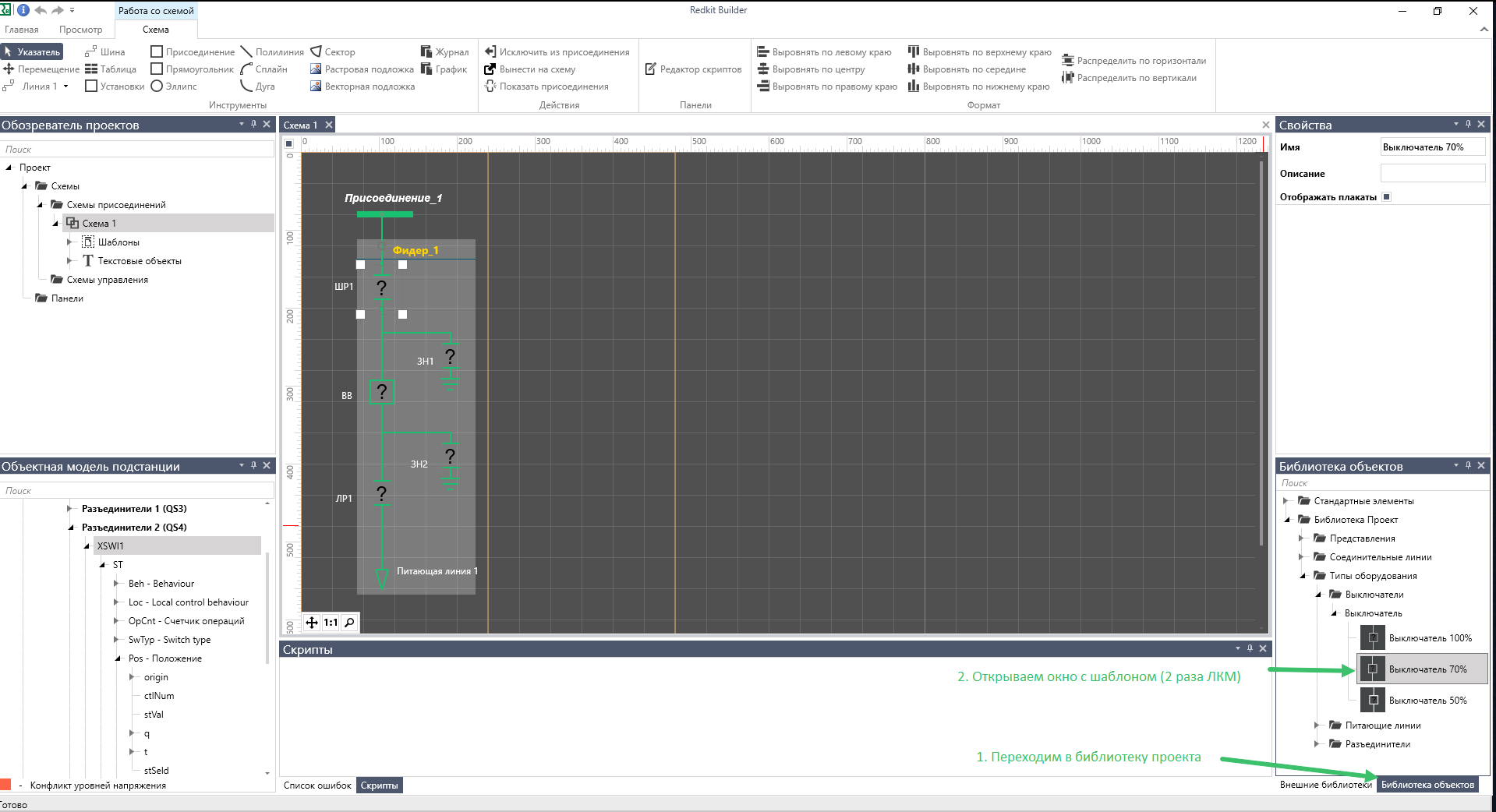
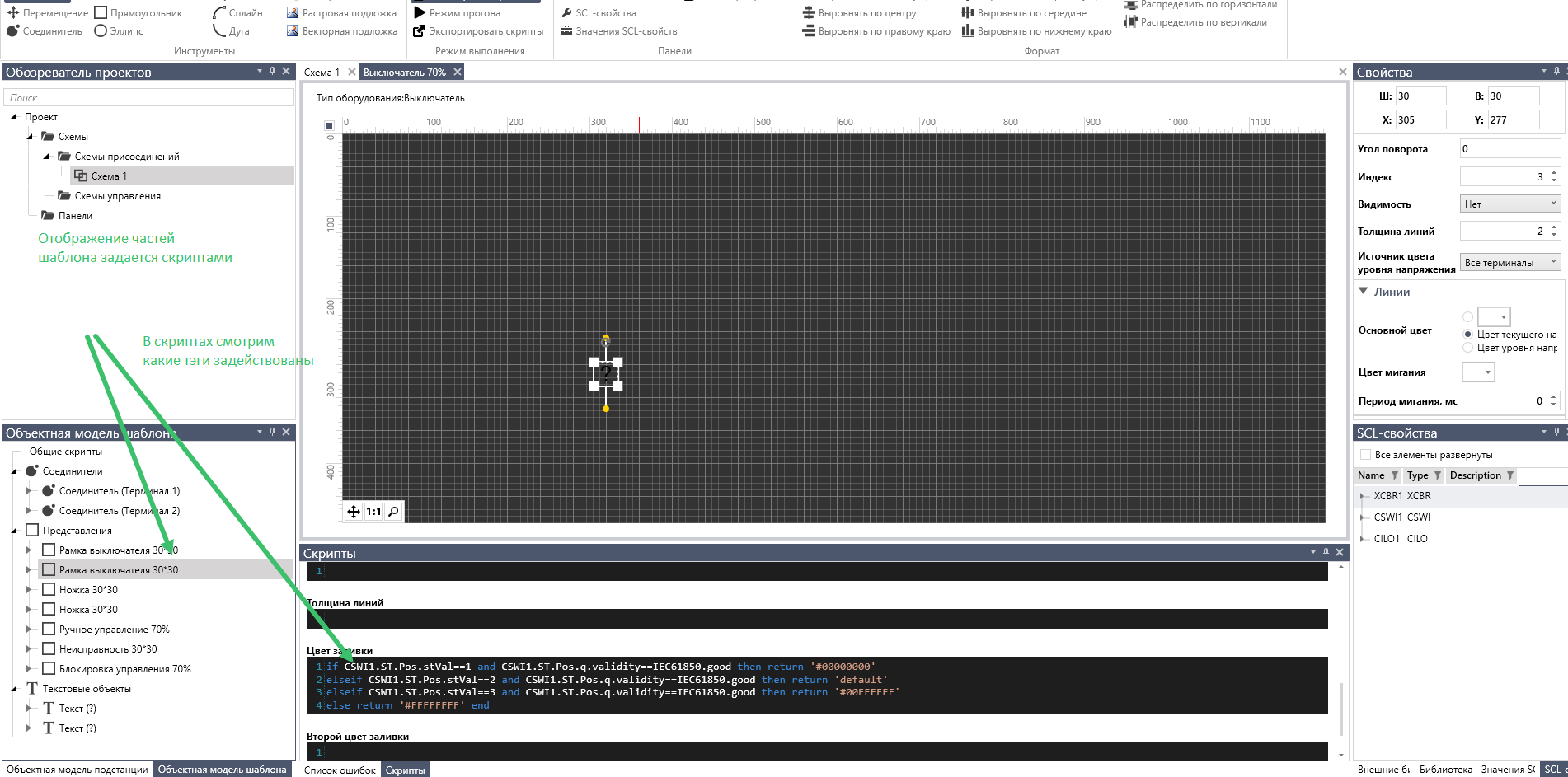
Привязываемые теги и поведение объектов ИЧМ, в зависимости от значения этих тэгов (привязанные к ним канал их меняют) лучше всего смотреть в представлениях, добавленных из Внешних Библиотек в Библиотеку объектов, устройств. Делается это непосредственно в Redkit Builder. Подробнее на скриншотах ниже